
목차
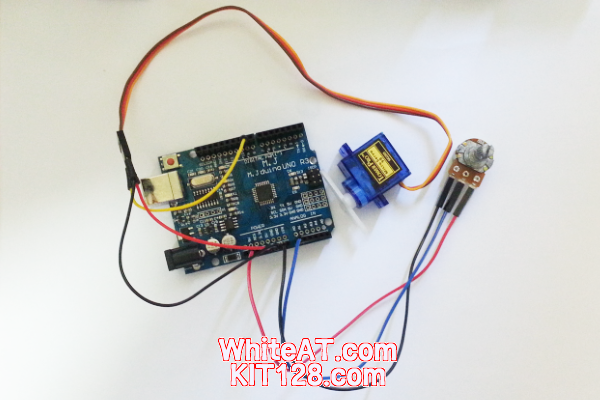
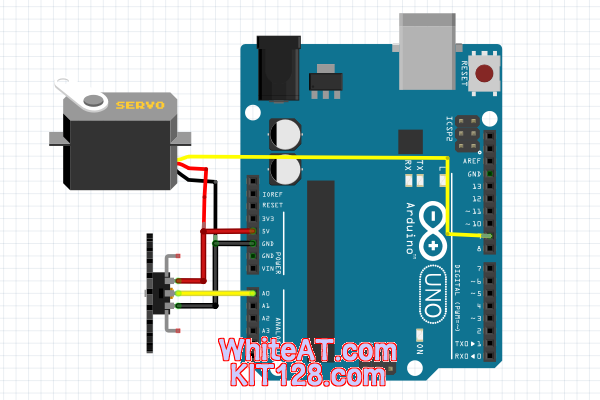
가변저항, 서보모터 제어
가변저항의 값에 따라 서보모터의 위치를 변경하는 실험입니다.
부품 목록
| 부품명 | 아두이노 UNO R3 |
|
|---|---|---|
| 기능 | 아두이노 모듈 | |
| 수량 | 1 | |
| 아두이노 모듈 |

| 부품명 | TowerPro SG90 |
|
|---|---|---|
| 기능 | 미니 서보모터 | |
| 수량 | 1 | |
| 서보모터 |

| 부품명 | 포텐셔미터(가변저항) |
|
|---|---|---|
| 기능 | 저항 값 가변 | |
| 수량 | 1 | |
| 가변저항 |

소스코드
최신 소스코드는 [파일]=>[WhiteAT UNO] => [Starter] => [06_VR_Servo] 에 있으며
라이브러리는 아두이노 개발환경 을 참조하세요
/*
알찬 아두이노 세트(입문자용) 예제중
가변저항 값으로 서보모터 위치를 제어하는 예제 입니다.
알찬 아두이노 세트(입문자용): https://kit128.com/goods/view?no=133
출처: http://whiteat.com/Arduino
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}
결과
가변저항의 변화에 따라 서보모터의 위치가 변경됩니다.
주의사항
서보모터가 회전할때 순간적으로 많은 전류가 필요합니다.
(순간적으로) 전원이 부족할 경우 모터 회전 중에 리셋될 수 있으므로
서보모터에 별도의 전원을 공급하거나 용량이 큰 캐패시터를 추가해 줘야 합니다.
제품 구매
알찬 아두이노 키트(초보자용) 은 https://kit128.com/goods/view?no=133 에서 구매하실 수 있습니다.
.
