
목차
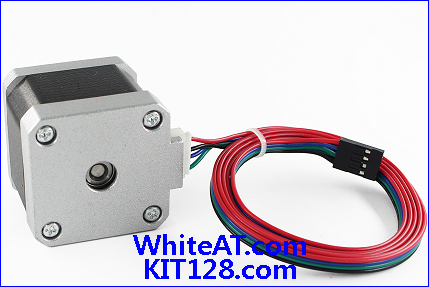
바이폴라 스텝모터(4선)
바이폴라 스텝모터 입니다.

특징
- Step Angle : 1.8 degree
- 전류 : 1.7A
- 몸통 높이: 약 37mm
- Holding Torque : 40 N.cm
- Detent Torque : 2.2 N.cm

실험
아두이노에 아래와 같이 연결합니다.

소스코드
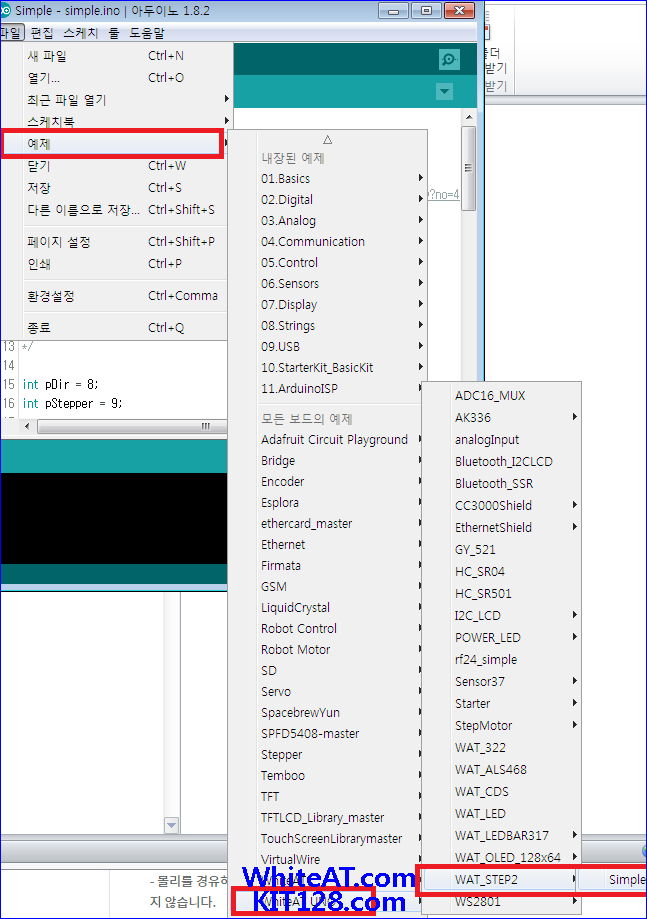
최신 소스코드는 [파일]=>[예제]=> [WhiteAT UNO]=>[WAT-STEP2] 에 있으며
라이브러리는 아두이노 개발환경 (https://docs.whiteat.com/?page_id=5449) 을 참조하세요
/*
[WAT-STEP2] 바이폴라 스텝모터 구동 예제입니다.
UNO R3 : https://kit128.com/goods/view?no=337
WAT-STEP2 바이폴라 스텝모터 드라이버: https://kit128.com/goods/view?no=467
보드 연결
UNO R3 (8) = WAT-STEP2 (DIR)
UNO R3 (9) = WAT-STEP2 (STEP)
출처: https://docs.whiteat.com/?p=5547
*/
int pDir = 8;
int pStepper = 9;
void setup()
{
Serial.begin(115200); // 시리얼 통신 초기화
Serial.println("WAT-STEP2 bipolar stepper motor - https://docs.whiteat.com/?p=5547");
pinMode(pDir, OUTPUT);
pinMode(pStepper, OUTPUT);
}
void step(boolean dir,int steps)
{
digitalWrite(pDir,dir);
delay(50);
for(int i=0;i<steps;i++){
digitalWrite(pStepper, HIGH);
delayMicroseconds(700);
digitalWrite(pStepper, LOW);
delayMicroseconds(700);
}
}
void loop()
{
step(HIGH,3500);
delay(500);
step(LOW,3500);
delay(500);
}

결과
5초 간격으로 방향을 바꾸면서 회전을 반복합니다.
제품 구매
아두이노 우노 R3는 https://kit128.com/goods/view?no=337 에서
[WAT-STEP2] 바이폴라 스텝모터 드라이버는 https://kit128.com/goods/view?no=467 에서 구매하실 수 있습니다.
