
목차
제품 소개
WAT-CHERRY 키트는 PID 제어 이론을 실제 하드웨어에서 실험할 수 있게 도와 주는 키트입니다. 온도 센서를 입력으로 펠티어 소자를 ON/OFF 제어, P제어, PI제어, PID 제어 등으로 제어하며 계수를 직접 변경하면서 제어량과 목표값의 관계를 쉽게 이해할 수 있게 도와 줍니다.
특징
| 항목 | 내용 |
| 펠티어 용 전압 | 3.3V |
| 냉각팬용 전압 | 9 ~ 12V (장시간 사용할 경우 냉각팬 구동해야 함) |
| 보드 사이즈 | 100 mm x 53 mm |
| 제어 범위 (℃) | 실온- 10 < 제어범위<실온+10 (3.3V/1A 사용시) |
| 인터페이스 | USB |
구조
인터페이스
 |
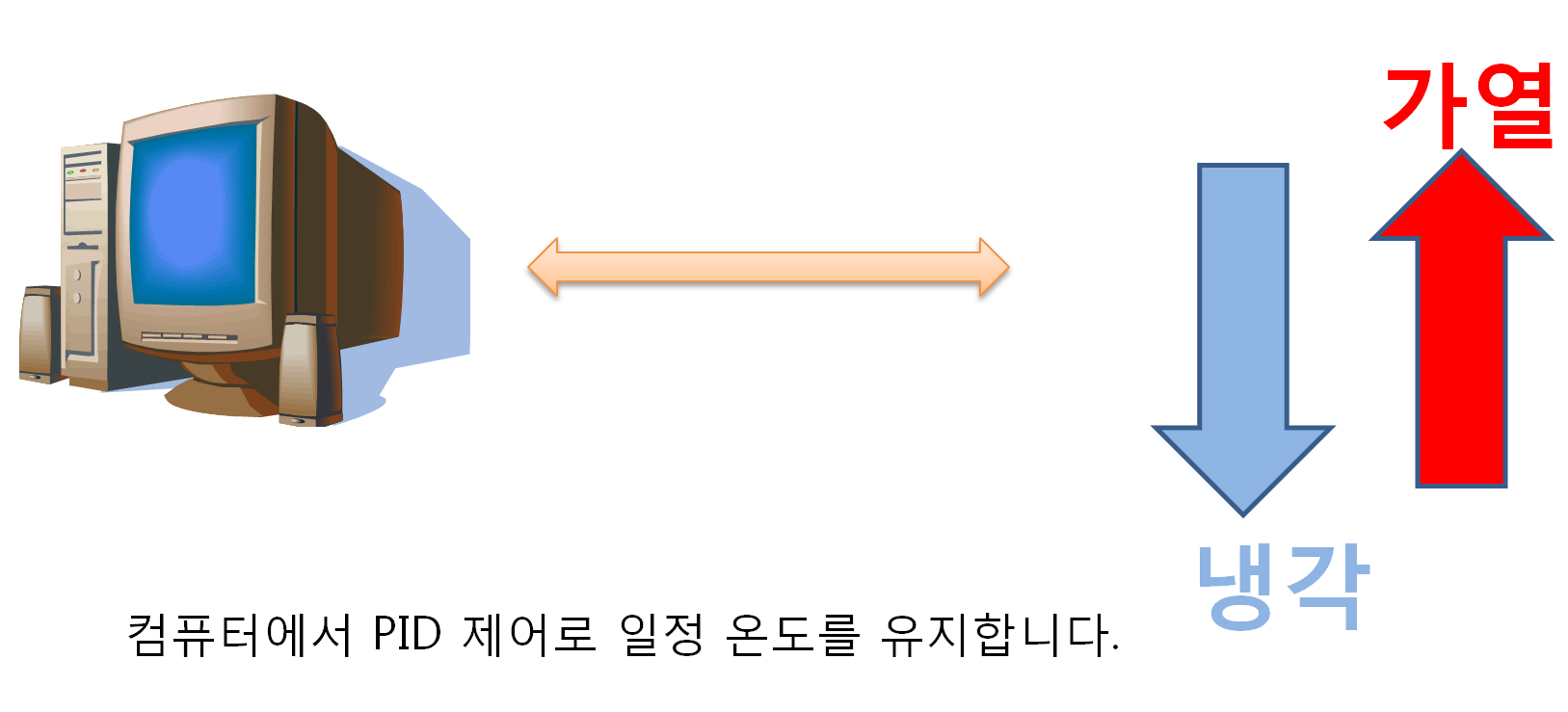
- USB 연결
컴퓨터와 통신을 위해 1번처럼 USB 케이블을 연결합니다.
- 펠티어 전원
2 번에 3.3V (1A 이상) 의 아답터를 연결합니다. 이는 펠티어 소자 제어용으로 사용됩니다.
- 냉각 팬 전원
3 번에 12V (100mA 이상) 의 전원을 연결합니다. 이는 펠티어 소자에서 발생하는 열을 줄이는데 사용됩니다.
상태 표시등
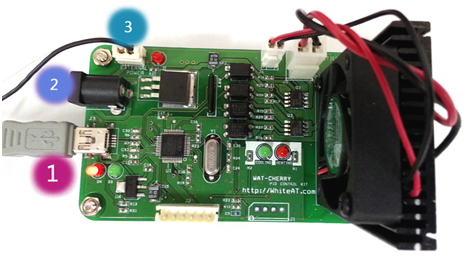
WAT-CHERRY 키트에는 상태를 표시하는 5개의 LED가 있으며 각 기능은 다음과 같습니다.
| 번호 | 기능 | 정상일 때 |
| 1 | 펠티어 소자용 전원 확인용 | 항상 ON |
| 2 | USB 전원 확인용 | 항상 ON |
| 3 | 동작 확인용 | PID 제어시 깜빡임 |
| 4 | 펠티어 제어 상태(냉각) | 냉각 시 ON |
| 5 | 펠티어 제어 상태(가열) | 가열 시 ON |
드라이버 설치
다운로드
WAT-CHERRY 드라이버 (다운로드) 를 다운로드 후 드라이버를 설치합니다.
(윈도우8 에서의 드라이버 설치방법은 https://docs.whiteat.com/?p=1002 를 참조하세요.)
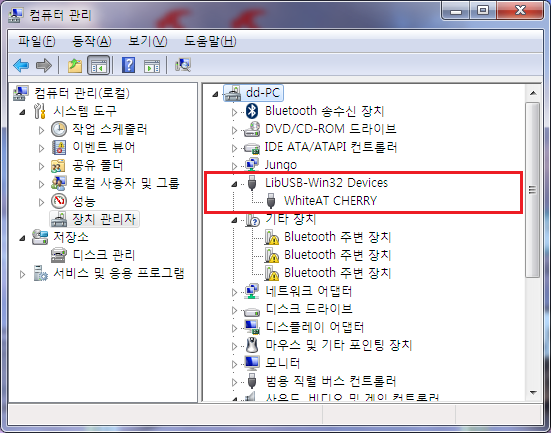
드라이버를 설치하면 다음과 같이 “WhiteAT CHERRY” 드라이버가 보이게 됩니다.
윈도우 프로그램
윈도우 프로그램(C#) 소스코드와 관련 자료(핵심코드 포함)는 제품 구매시 주문하신 e-mail 로 전송해 드립니다.
실험
윈도우 프로그램으로 PID 제어를 해보겠습니다. 제공되는 예제로 ON/OFF, P, PI, PID 를 모두 실험할 수 있습니다.
먼저 CHERRY 키트를 연결하고 윈도우 프로그램을 실행합니다. 프로그램 하단에 [보드와 연결 성공] 이라고 나타나면 정상적으로 연결된 것입니다.
[연결 실패], [연결 끊김] 등의 메시지가 나타나면 연결을 다시 확인한 후 프로그램을 다시 실행하시면 됩니다.
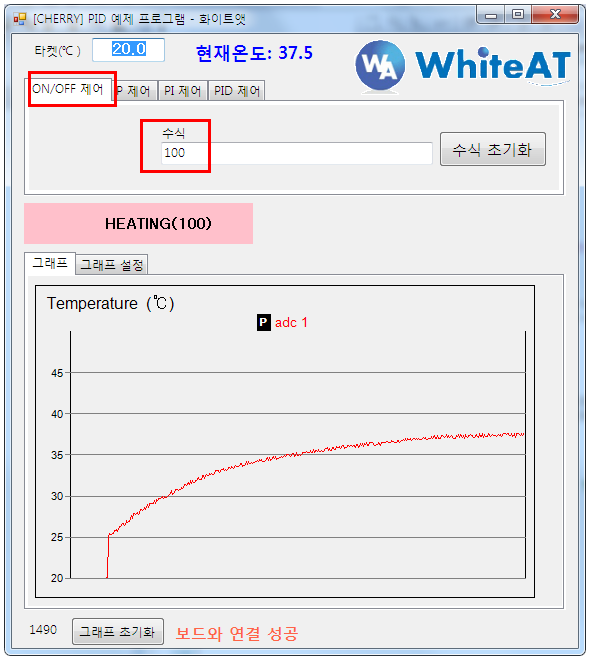
최대 가열
수식으로 100(또는 +100)을 입력하면 최대한 가열하게 됩니다. CHERRY 키트 온도의 최고 값을 구할 수 있습니다.
37.5 도까지 올라감을 할 수 있습니다.
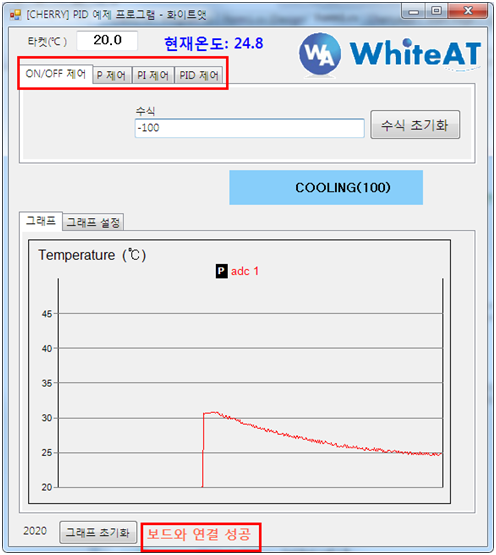
최대 냉각
수식으로 -100을 입력하면 최대한 냉각하게 됩니다. CHERRY 키트 온도의 최저 값을 구할 수 있습니다.
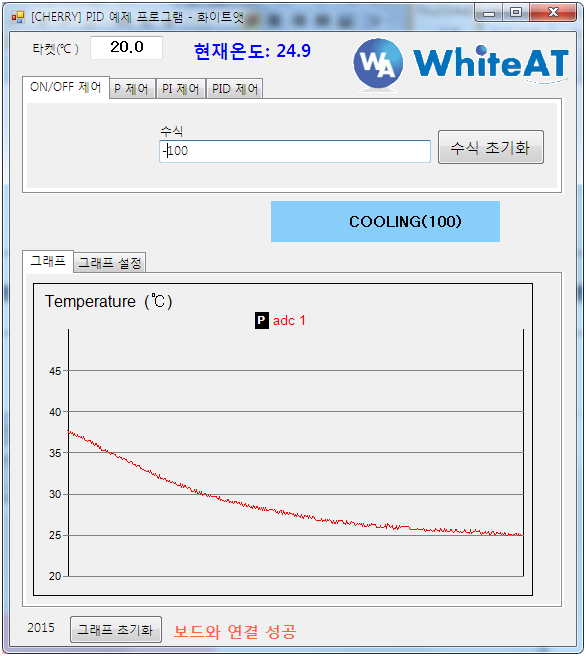
온도가 25도까지 내려감을 알 수 있습니다.
ON/OFF 제어
ON/OFF 제어는 조작량을 -100%와 +100%으로 하기 때문에 조작량의 변화가 너무 크고 목표값에 대해 지나치게 반복하여 목표값의 부근에서 큰 진동 모양으로 반복하는 제어 방식입니다.
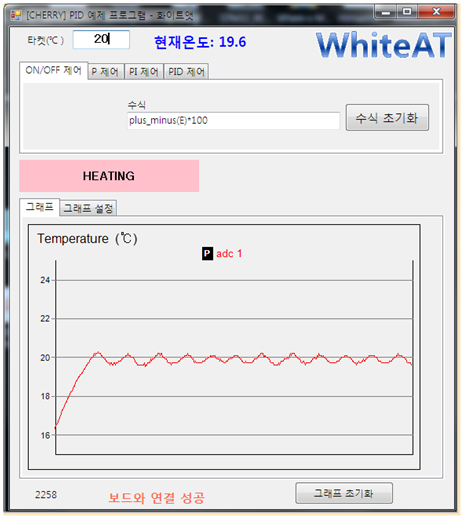
처음 20도로 온도가 상승한 후 20도를 기준으로 진동을 하게 되는데 주변 온도가 15도라서 평균적으로 약 19도 정도를 유지하게 됩니다.
만약 주변온도가 10도라면 평균온도는 그 이하가 될 수도 있습니다.
이 방식은 주변온도에 따라 평균 온도가 달라지며 순간순간의 조작량이 많아 효율이 좋지 않습니다.
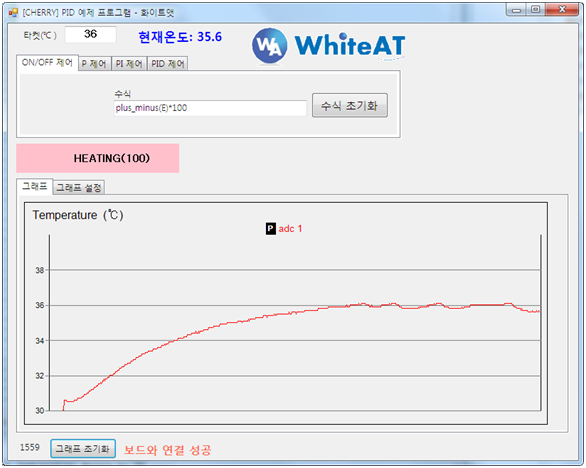
목표값이 36도 일 때도 36도를 기준으로 진동을 하게 됩니다.
P 제어
조작량을 목표값과 현재 값과의 차에 비례하게 하여 서서히 조절하는 제어 방법을 비례 제어라고 합니다.
이렇게 하면 목표값에 접근하면 좀더 세밀하게 제어를 가할 수 있기 때문에
ON/OFF 제어보다 세밀하게 목표값에 접근할 수 있습니다.

얼핏 보면 ON/OFF 제어와 비슷해 보이지만 조작량의 최대값을 조절하여 진동폭을 줄일 수 있습니다. 하지만 진동폭이 작아져도 여전히 진동하는 문제가 있습니다.
PI 제어
P 제어 식에 에러의 누적 값을 더해 주면 좀더 안정적인 제어를 할 수 있습니다.
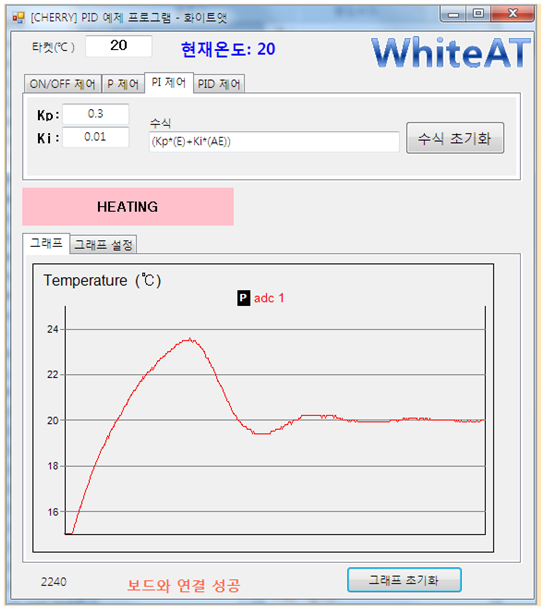
PI 제어는 빠르게 목표값에 도달한 듯 보이지만 마지막에 약간의 진동이 있습니다.
PID 제어
비례 제어만으로 제어가 잘 될 것이라 생각되겠지만 실제로는 제어량이 목표값에 접근하면 문제가 발생합니다. 조작량이 너무 작아지고, 그 이상 미세하게 제어할 수 없는 상태가 그러합니다.
결과는 목표값에 아주 가까운 제어량의 상태에서 안정한 상태로 될 수 있는데 비례제어만 사용하게 되면 목표값에 가까워지더라도 제어량과 완전히 일치하지 않는 상태로 되고 맙니다.
이 미소한 오차를 “잔류편차”라고 하는데 이 잔류편차를 없애기 위해 사용되는 것이 적분 제어입니다.
즉, 미소한 잔류편차를 시간적으로 누적하여, 그 누적값을 조작량에 증가하여 편차를 없애는 식으로 동작시킬수 있습니다.
이와 같이, 비례 동작에 적분 동작을 추가한 제어를 “PID 제어”라 합니다.
PID 제어로 빠르고 작은 진동으로 목표 값에 도달합니다.
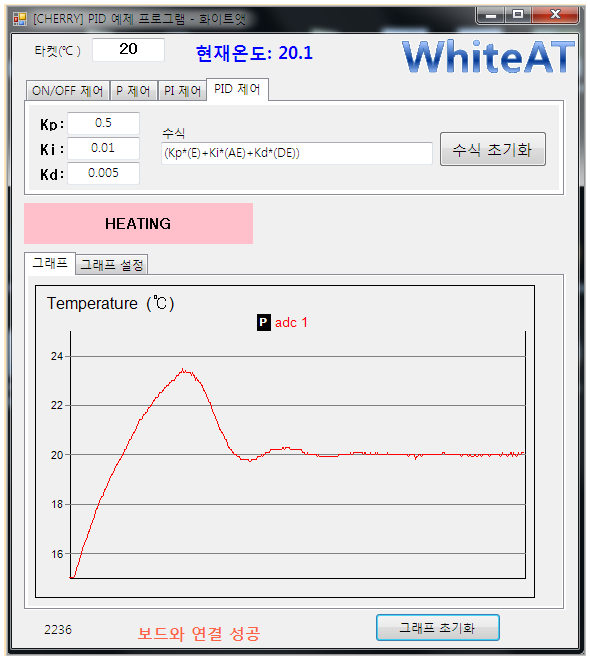
< PID 제어 >
제품 구매
PID 제어 실험 키트(WAT-CHERRY) 는 https://kit128.com/goods/view?no=54 에서 구매하실 수 있습니다.
